Nessun risultato. Prova con un altro termine.
Prodotti
Notizie
Topic
Offerte
Gadget e Device
Smartphone
Tablet
Smart Home
Imaging
Google
Microsoft
Apple
Tutto in Gadget e Device
Intrattenimento
Streaming
Videogiochi
Tutto in Intrattenimento
Software e App
Antivirus
VPN
Corsi
Web e Social
Tutto in Software e App
Business
Criptovalute
Finance
Tutto in Business
Trending
Perché TCL vende televisori di qualità a prezzi bassi
Apple premia l’eccellenza: ecco i vincitori degli App Store Award 2025
Netflix contro Chromecast
About
Redazione
Disclaimer
Informativa Privacy
RSS
Offerte
Gadget e Device
Smartphone
Tablet
Smart Home
Imaging
Google
Microsoft
Apple
Tutto in Gadget e Device
Intrattenimento
Streaming
Videogiochi
Tutto in Intrattenimento
Software e App
Antivirus
VPN
Corsi
Web e Social
Tutto in Software e App
Business
Criptovalute
Finance
Tutto in Business
Trending:
Perché TCL vende televisori di qualità a prezzi bassi
Apple premia l’eccellenza: ecco i vincitori degli App Store Award 2025
Netflix contro Chromecast
Domani
Claude Fable 5 e Mythos 5 disabilitati: il primo stop globale all’AI imposto dagli Stati Uniti
Apple
Queste sono le 10 funzioni nascoste più potenti di Apple: perché non le conoscevamo già?
Gadget e Device
Claude Fable 5 e Mythos 5 bloccati: il primo caso di export control globale sull’IA
Antivirus
Visiti questa pagina web e il pc viene compromesso: così gli hacker mettono in ginocchio Chrome
Software e App
WhatsApp, gli stati non scompaiono dopo 24 ore, ma finiscono in un archivio segreto
Smart Home
Alexa+ alla prova: Amazon trasforma l’assistente vocale in un’AI domestica, ma la velocità resta il punto debole
Prezzi e tariffe
Non solo Amazon: perché il 19 Giugno è una data fondamentale per tutte le piattaforme di shopping online
il meglio della settimana
Gadget e Device
Lefant M5 Pro a prezzo outlet su Amazon: 65% di sconto per il robot aspirapolvere e lavapavimenti
Smart Home
I robot aspirapolvere e lavapavimenti Lefant in sconto del 72% su Amazon
Gadget e Device
Robot aspirapolvere compatto con navigazione laser: Lefant M330 Pro in offerta a 139,99€ su Amazon
Software e App
Linea di Fiorano e AI: l’innovazione è nel DNA del marchio
Smart Home
Lefant M330 Pro: il robot aspirapolvere 3 in 1 è in offerta a prezzo stracciato su Amazon
Gadget e Device
Teclast lancia ArtPad Pro: tablet per creativi con display da 12,7" e funzione telefono
Gadget e Device
GEEKOM IT12: prezzo competitivo e super sconto -18% per il Mini PC
Gadget e Device
MiniPC con AMD Ryzen 7 in offerta: 20% di sconto sul sito ufficiale (CODICE SCONTO)
Web e Social
Questa pronuncia della Cassazione costringe Google al delisting delle notizie obsolete
Gadget e Device
Chuwi lancia GameBook: Ryzen 9, 32Gb di RAM e RTX 5070Ti a PREZZO FOLLE (Codice Sconto)
VPN e Sicurezza Online
VPN
Migliori VPN per Giocare a Call of Duty Modern Warfare 3 (2026)
Software e App
Recensione e Guida Surfshark VPN (2026)
VPN
Come Nascondere l'Uso di una VPN (Guida)
Software e App
NordVPN: recensione e guida (aggiornata al 2026)
Software e App
Offerte Black Friday 2024: le migliori VPN scontate
Software e App
VPN per PS4 e PS5: quale scegliere e come installarle
VPN
VPN su iPhone e iPad: guida alla scelta e alla configurazione sicura
Prezzi e tariffe
MacBook Pro 14 con M5 Pro in offerta: perché lo sconto da 300 euro interessa i professionisti
Business
Con ‘Abbassa la Bolletta’ si risparmiano quasi € 200 ma nessuno lo sa: come funziona l’ultima agevolazione per tutti
Gadget e Device
Caricabatterie USB pericolosi: i test che rivelano rischi di scosse, incendi e danni ai dispositivi
Domani
Ventilatore, anche il tuo può essere trasformato in un condizionatore: basta un’aggiunta da 0,50 €
Google
GreatXML mette alla prova BitLocker: cosa cambia per la sicurezza dei PC Windows
Gadget e Device
Memoria piena dello smartphone, non cancellare tutte le foto: basta un clic e si recuperano molti Giga in automatico
Software e App
Google porta Gemini 3.5 in Traduttore e Meet: la sfida della traduzione vocale naturale
Recensioni
tutti
8
Lenovo IdeaPad 3 con Ryzen 7: il laptop tuttofare da 500 euro
0
Arlo Essential: videocamera da esterno completa e versatile
7.9
Jabra PanaCast 20 4K: la soluzione ideale per le video conferenze
7.4
Nespresso Vertuo Pop: la nostra recensione
6.9
Hoover H-FREE 100: recensione dell’aspirapolvere senza fili
8.4
Catena di lampadine da esterno Govee: la nostra recensione
8.2
Luci a LED natalizie smart, la recensione di Twinkly Cluster
9
TCL C63 QLED TV: un ottimo TV al giusto prezzo
7.9
Oppo Watch Free: Recensione
8.7
Oppo Find X5 Pro: recensione completa
8.9
Lenovo Tab P11 5G: la nostra recensione
9.5
Google Pixel 6 | 6 Pro: i veri flagship Android
8.8
Lenovo IdeaPad Flex 5 Chromebook: la nostra recensione
9
GoPro HERO10 Black: la nostra recensione
9
Zhiyun Smooth 5 e Smooth X2: i nuovi gimbal per smartphone
9
Twinkly Strings (Generation II): l’albero di Natale diventa smart
9.1
Amazon Kindle Paperwhite 2021: il miglior Kindle di sempre?
8.8
Asus VivoBook Pro 14X
9.3
Amazon Fire TV Stick 4K Max
8.8
Nest Cam: la videocamera Made by Google
Prezzi e tariffe
Action, approfitta ora o mai più: tutta la cassetta degli attrezzi costa una miseria
Software e App
Mouzi, il tool open source che riordina automaticamente la cartella Download di Windows
Apple
Se stai pensando di vendere il tuo vecchio dispositivo Apple, fermati: perché farlo sarebbe un errore grandissimo
Google
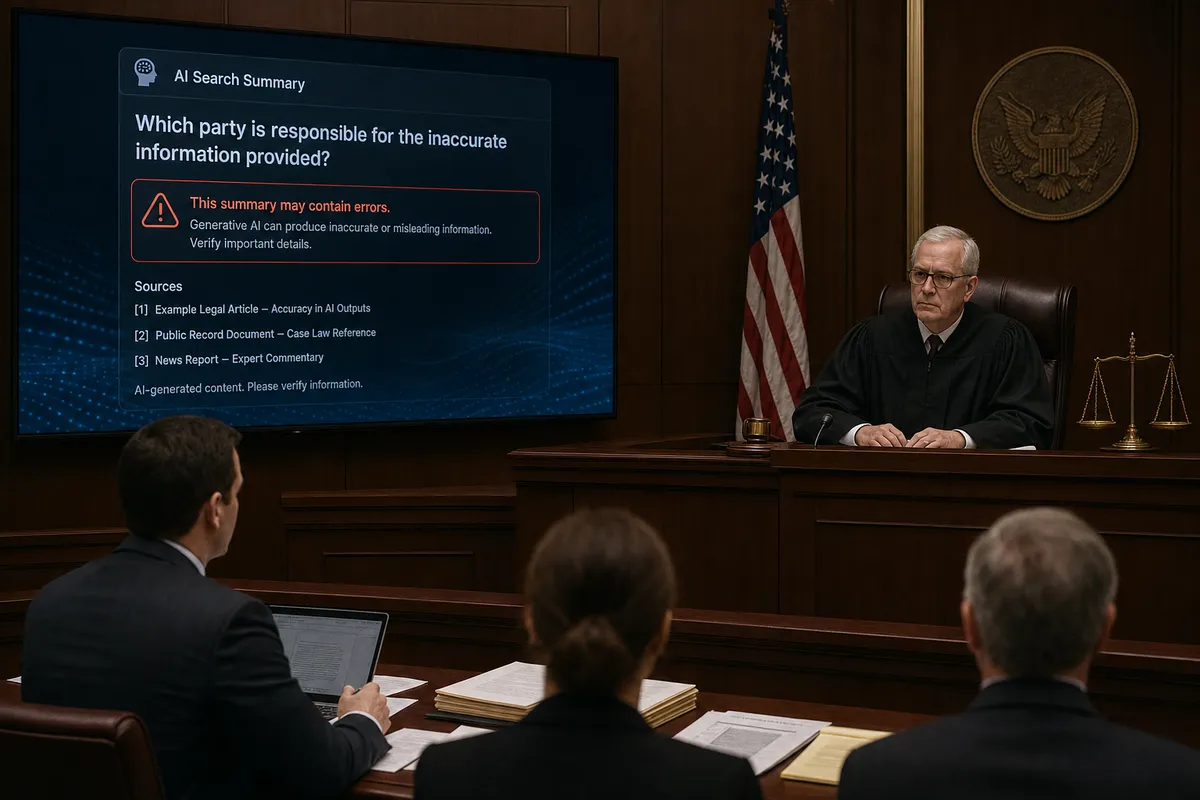
Google responsabile degli errori di AI Overview: cosa cambia dopo la sentenza tedesca
Prezzi e tariffe
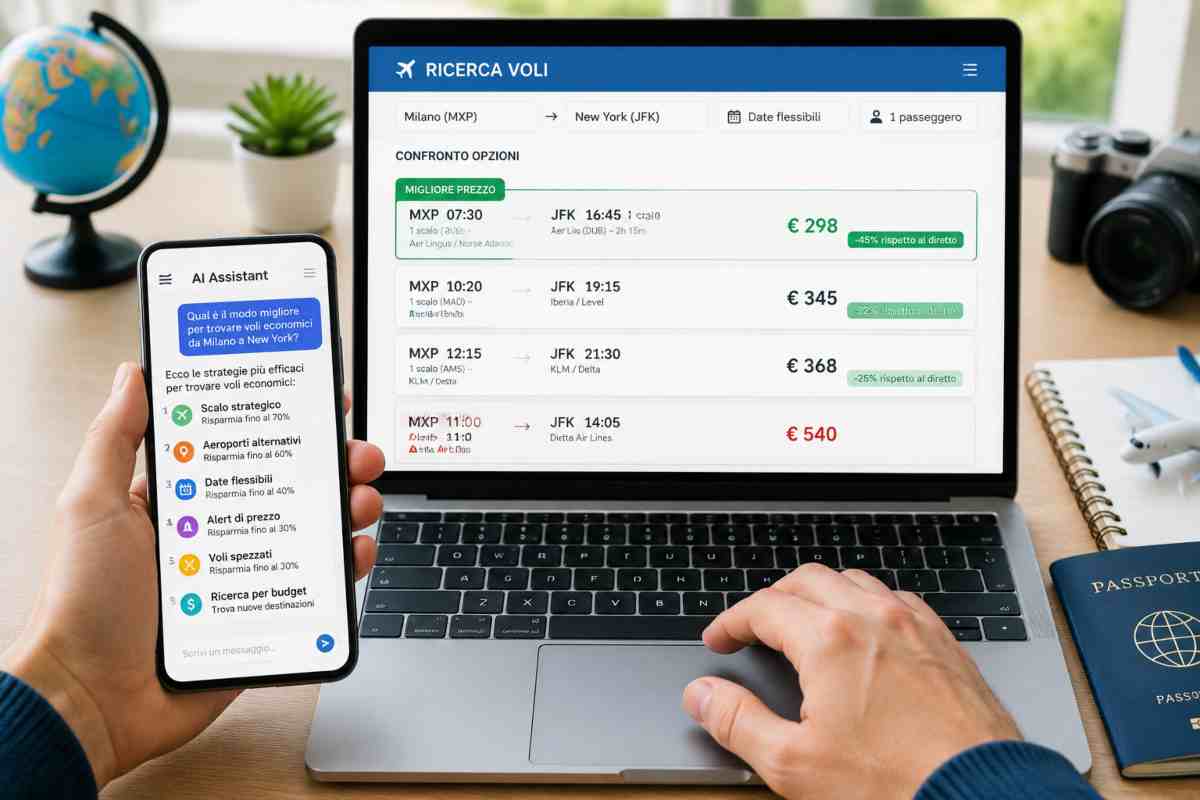
AI, hanno provato a fare queste domande e si sono ritrovati sconti incredibili sui voli: nessuno ha trovato prezzi migliori
Gadget e Device
Router sotto attacco: come capire in un attimo se all’interno del tuo si nascondono account segreti
Smart Home
Amazon ridisegna Echo Hub: dashboard personalizzabile, controlli smart e AI per la sicurezza domestica
Domani
Caldo record, l’Italia è a rischio blackout: cosa sta per succedere e come chiedere il rimborso della bolletta
Gadget e Device
HP svela il PC Windows per l’AI locale: potenza da data center sulla scrivania
Intrattenimento
Masters of the Universe: Legends Unite arriva su Amazon Luna: cosa offre il nuovo gioco esclusivo Prime
Business
Pagamenti col POS, c’è un metodo più sicuro della carta di credito: pochi lo usano, ma non si rischia
VPN
Surfshark sotto i 2 euro al mese: guida all’offerta flash per attivare una VPN illimitata
Software e App
Audio e chiamate false, ora si possono riconoscere in un attimo: come funziona la procedura fin media
Prezzi e tariffe
iPad Pro 13” M5 ai minimi storici: cosa sapere sull’offerta Amazon
1
2
3
4
5
6
7
8
9
10
Change privacy settings
×














")

")
")
")
")
")