Nessun risultato. Prova con un altro termine.
Prodotti
Notizie
Topic
Offerte
Gadget e Device
Smartphone
Tablet
Smart Home
Imaging
Google
Microsoft
Apple
Tutto in Gadget e Device
Intrattenimento
Streaming
Videogiochi
Tutto in Intrattenimento
Software e App
Antivirus
VPN
Corsi
Web e Social
Tutto in Software e App
Business
Criptovalute
Finance
Tutto in Business
Trending
Perché TCL vende televisori di qualità a prezzi bassi
Apple premia l’eccellenza: ecco i vincitori degli App Store Award 2025
Netflix contro Chromecast
About
Redazione
Disclaimer
Informativa Privacy
RSS
Offerte
Gadget e Device
Smartphone
Tablet
Smart Home
Imaging
Google
Microsoft
Apple
Tutto in Gadget e Device
Intrattenimento
Streaming
Videogiochi
Tutto in Intrattenimento
Software e App
Antivirus
VPN
Corsi
Web e Social
Tutto in Software e App
Business
Criptovalute
Finance
Tutto in Business
Trending:
Perché TCL vende televisori di qualità a prezzi bassi
Apple premia l’eccellenza: ecco i vincitori degli App Store Award 2025
Netflix contro Chromecast
Smartphone
HONOR Magic V6: il pieghevole più sottile al mondo (4 mm) arriva in Italia a 2.299 euro
Gadget e Device
Così puoi distinguere subito un cavo lento da uno veloce: lascia perdere le diciture
Motori
Nuova accisa per le auto: la decisione fa discutere e preoccupare tutta l'Europa
Domani
OpenAI rilascia GPT-5.6 a tutti: cosa è cambiato giovedì e perché può permetterselo
Motori
Tutti lo trasportano in auto in estate ma non sanno che è vietato e scatta la molta da 344 euro
Gadget e Device
Questo vecchio prodotto Apple è improvvisamente tornato di gran moda (e costa solo 18 euro)
Web e Social
Gli utenti di Facebook possono ancora richiedere un risarcimento danni
il meglio della settimana
Gadget e Device
Lefant M5 Pro a prezzo outlet su Amazon: 65% di sconto per il robot aspirapolvere e lavapavimenti
Smart Home
I robot aspirapolvere e lavapavimenti Lefant in sconto del 72% su Amazon
Gadget e Device
Robot aspirapolvere compatto con navigazione laser: Lefant M330 Pro in offerta a 139,99€ su Amazon
Software e App
Linea di Fiorano e AI: l’innovazione è nel DNA del marchio
Smart Home
Lefant M330 Pro: il robot aspirapolvere 3 in 1 è in offerta a prezzo stracciato su Amazon
Gadget e Device
Teclast lancia ArtPad Pro: tablet per creativi con display da 12,7" e funzione telefono
Gadget e Device
GEEKOM IT12: prezzo competitivo e super sconto -18% per il Mini PC
Gadget e Device
MiniPC con AMD Ryzen 7 in offerta: 20% di sconto sul sito ufficiale (CODICE SCONTO)
Web e Social
Questa pronuncia della Cassazione costringe Google al delisting delle notizie obsolete
Gadget e Device
Chuwi lancia GameBook: Ryzen 9, 32Gb di RAM e RTX 5070Ti a PREZZO FOLLE (Codice Sconto)
VPN e Sicurezza Online
VPN
Migliori VPN per Giocare a Call of Duty Modern Warfare 3 (2026)
Software e App
Recensione e Guida Surfshark VPN (2026)
VPN
Come Nascondere l'Uso di una VPN (Guida)
Software e App
NordVPN: recensione e guida (aggiornata al 2026)
Software e App
Offerte Black Friday 2024: le migliori VPN scontate
Software e App
VPN per PS4 e PS5: quale scegliere e come installarle
Motori
Da luglio è obbligatoria sulle auto nuove: cosa vede davvero la telecamera che controlla il conducente
Domani
L'ente previdenziale revoca la pensione di invalidità a una donna dopo un suo viaggio e la obbliga a restituire 32.800 euro
Finance
Nuova tassa sui conti correnti: cosa cambia da agosto
Gadget e Device
Action sbaraglia la concorrenza con il suo raffreddatore d'aria a meno di 40 euro
Business
Lasciare l'auto nel parcheggio del supermercato per andare altrove: la Legge al riguardo è molto chiara
Motori
Nuove regole per gli Autovelox da Luglio: se hai preso una multa leggi bene prima di pagare
Software e App
Android Auto ha un menu nascosto che solo in pochi conoscono: puoi attivarlo così
Motori
Un meccanico avverte: "Un errore che commettiamo tutti è quello di salire in auto, accendere l'aria condizionata e chiudere le portiere"
Recensioni
tutti
8
Lenovo IdeaPad 3 con Ryzen 7: il laptop tuttofare da 500 euro
0
Arlo Essential: videocamera da esterno completa e versatile
7.9
Jabra PanaCast 20 4K: la soluzione ideale per le video conferenze
7.4
Nespresso Vertuo Pop: la nostra recensione
6.9
Hoover H-FREE 100: recensione dell’aspirapolvere senza fili
8.4
Catena di lampadine da esterno Govee: la nostra recensione
8.2
Luci a LED natalizie smart, la recensione di Twinkly Cluster
9
TCL C63 QLED TV: un ottimo TV al giusto prezzo
7.9
Oppo Watch Free: Recensione
8.7
Oppo Find X5 Pro: recensione completa
8.9
Lenovo Tab P11 5G: la nostra recensione
9.5
Google Pixel 6 | 6 Pro: i veri flagship Android
8.8
Lenovo IdeaPad Flex 5 Chromebook: la nostra recensione
9
GoPro HERO10 Black: la nostra recensione
9
Zhiyun Smooth 5 e Smooth X2: i nuovi gimbal per smartphone
9
Twinkly Strings (Generation II): l’albero di Natale diventa smart
9.1
Amazon Kindle Paperwhite 2021: il miglior Kindle di sempre?
8.8
Asus VivoBook Pro 14X
9.3
Amazon Fire TV Stick 4K Max
8.8
Nest Cam: la videocamera Made by Google
Business
SK Hynix debutta a Wall Street con 26,5 miliardi: il boom dei chip per l'IA
Gadget e Device
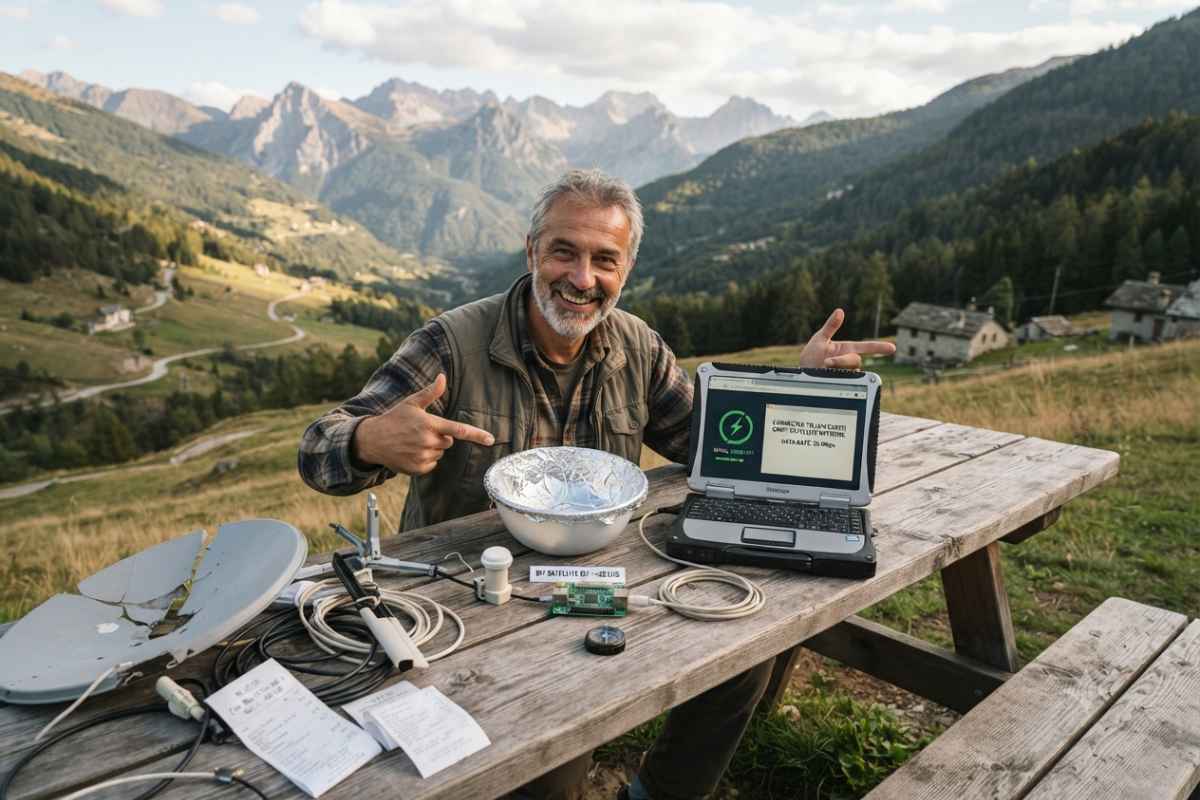
Ho testato tutte le soluzioni possibili nelle zone dove internet non prende, poi ho trovato questa a meno di 20 euro
Motori
Dacia Bigster a 189 euro al mese con reso gratuito
Business
Conti correnti, dal 1° agosto arriva la nuova tassa da pagare: cosa cambia per i nostri risparmi
Motori
Se questa spia in auto resta sempre accesa non c'è bisogno del meccanico: con questo trucco risolvi il problema gratis
Smartphone
iPhone in offerta su Amazon: i modelli sotto 500 euro
Motori
Il Defender cinese che costa la metà: ecco il clone
Gadget e Device
Smartphone, tablet, TV: la scienza ha stabilito qual è il peggiore per il cervello
Gadget e Device
Basta questo gadget da pochi euro per salvare il tuo PC dal caldo rovente: eviti di perdere tutti i dati
Prezzi e tariffe
Biglietti gratis per Gardaland: la domanda si può fare online
Gadget e Device
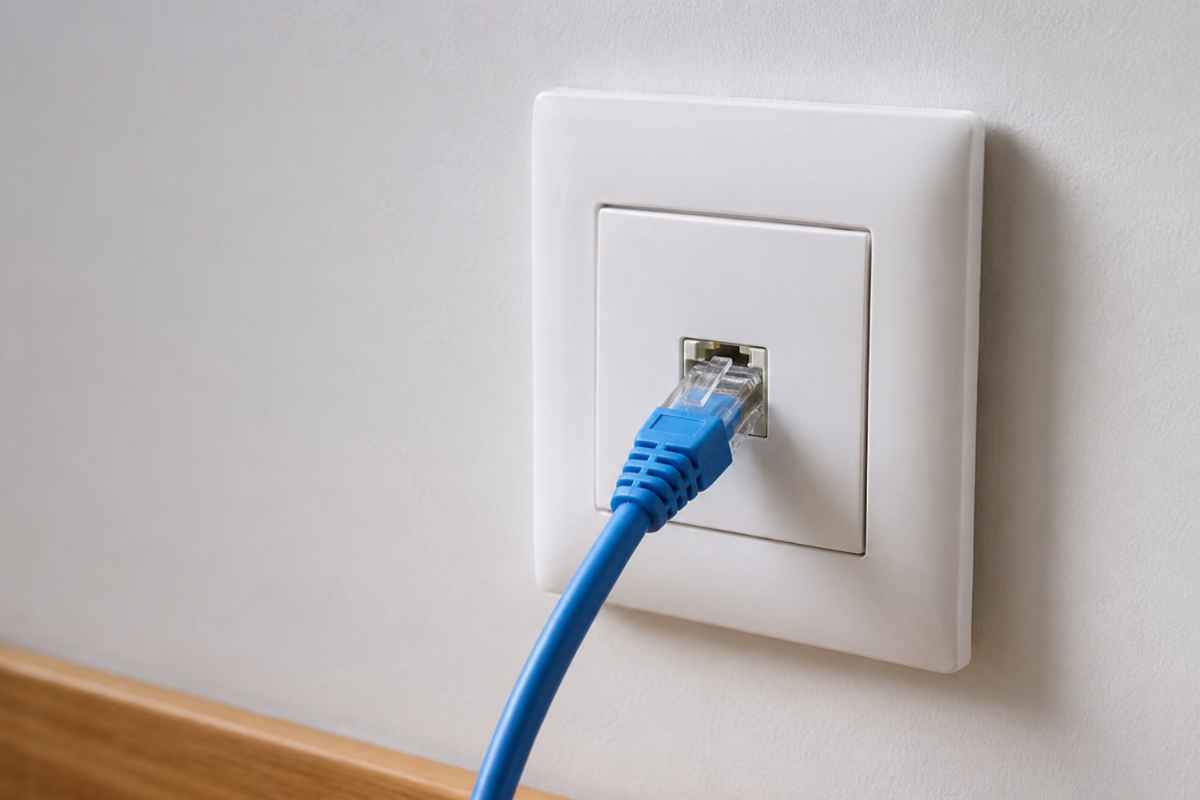
Converti la tua vecchia antenna in una connessione Ethernet e dì addio al Wi-Fi
Domani
La nuova truffa estiva svuota i conti dopo un pagamento online, c'è solo un modo per difendersi
Business
Il nuovo buono fruttifero postale è una miniera d'oro, 8% + 2.50% con tassazione agevolata al ritiro
Google
IA e clima: Google ammette che la corsa ai data center sta sabotando gli obiettivi green
1
2
3
4
5
6
7
8
9
10
Change privacy settings
×





")








")

")
")
")
")
")